 |
#include <ProbabilityMap.h>
Classes | |
| struct | BackwardParams |
| struct | CollisionDetectionParams |
| struct | MCParams |
Public Types | |
| enum | ProjectionMode { MC, BACKWARD } |
Public Member Functions | |
| ClassDef (Params, 6) | |
Public Attributes | |
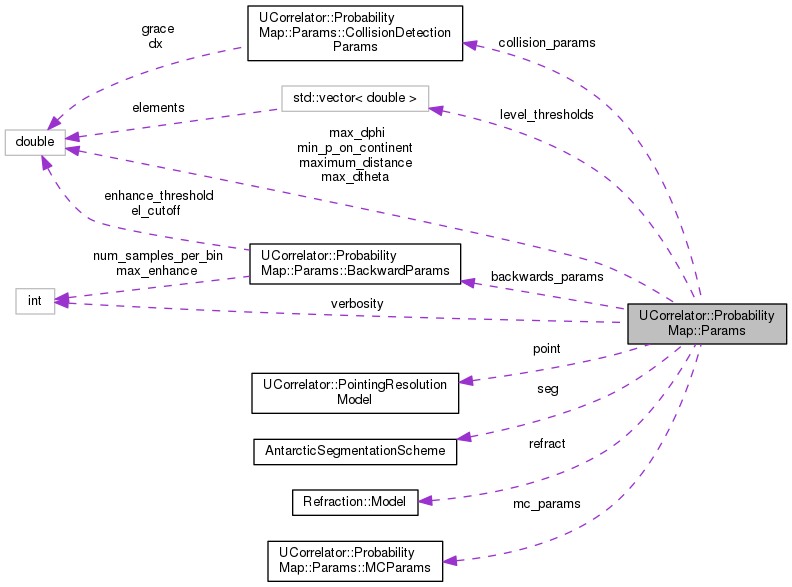
| const AntarcticSegmentationScheme * | seg |
| const PointingResolutionModel * | point |
| std::vector< double > | level_thresholds |
| RampdemReader::dataSet | dataset |
| const Refraction::Model * | refract |
| double | maximum_distance |
| double | min_p_on_continent |
| enum UCorrelator::ProbabilityMap::Params::ProjectionMode | projection |
| bool | collision_detection |
| struct UCorrelator::ProbabilityMap::Params::CollisionDetectionParams | collision_params |
| struct UCorrelator::ProbabilityMap::Params::MCParams | mc_params |
| struct UCorrelator::ProbabilityMap::Params::BackwardParams | backwards_params |
| double | max_dphi |
| double | max_dtheta |
| int | verbosity |
this encodes configuration for the ProbabilityMap
Definition at line 50 of file ProbabilityMap.h.
 1.8.11
1.8.11

